
Investor
- Alphy
- Aliceapp.ai – recording & transcription for journalists
- Others
Shift
IPO. Helped lead to IPO, turned around the tech and team for growth.
The RealReal
IPO. Helped lead to IPO, turned around the tech and team for growth.
Prysm
Prysm acquired Mammoth. In my role I focus on user acquisition and retention for the company: Head multiple customer-facing programs on web and mobile, affecting key corporate metrics, revenue, and entry into new markets.
CEO, Mammoth
Acquired. Launched a startup for messaging and collaboration in Feb 2013. It was acquired by Prysm in July 2016. Mammoth was a beautiful cloud SaaS product to collaborate on shared projects with file sharing, wikis & real-time messaging. Employees in USA, LATAM and India, served users across 80 countries. Grew company from inception all the way to acquisition.
We were invited to join the top ranked business incubator AngelPad. Here’s my post on Forbes about it.
Designed the first ever magic link password-less login loop.
Check out the archived Mammoth homepage with videos.
Sony PlayStation
Designed business solutions for PlayStation & WorldWideStudios – one of the biggest console game companies in the world. Delivered collaboration and asset management env for game producers, artists, developers, executives.
- Traveled to customer sites to understand problems, created guerrilla teams across departments to provide targeted solutions, saving millions.
- Created a rapidly adopted Forms Service (like Google Forms) in PHP, Javascript, Sqlite.
- Launched SSO, Identity & Access Management atop disparate enterprise products (Java, Spring, Yale CAS, LDAP)
- Developed a powerful, customizable, collaboration suite integrated with Alfresco, Confluence, JIRA, Jive, for game production. (HTML5, Java, Spring, Hibernate, Postgres)
The Indian List
Indian Yelp. Map-driven guide ![]() to local businesses and event listings with reviews and ratings.
to local businesses and event listings with reviews and ratings.  The application integrates with a variety of publicly available APIs, such as Google Maps, address geocoding, IP geocoding, Amazon S3, Facebook Connect and Social Plugins, MailChimp, and more. Based on SEO that works, and relying on zero marketing, the app saw repeat visitors every week.
The application integrates with a variety of publicly available APIs, such as Google Maps, address geocoding, IP geocoding, Amazon S3, Facebook Connect and Social Plugins, MailChimp, and more. Based on SEO that works, and relying on zero marketing, the app saw repeat visitors every week.
Heylos: A Co-Browsing Instant Messenger
Conceived and developed this cross-platform, full-featured instant messenger with a specific co-browsing feature set.  Wrote XMPP Server extensions, browser add-ons for IE and Firefox, client installation scripts and an auto-updating platform. Heylos went through a controlled beta, primarily by word-of-mouth, and was in use by a few hundred users. Met with Tech Coast Angels to raise an angel round, however, I ultimately shut it down due to unavailability of a suitable entrepreneur VISA.
Wrote XMPP Server extensions, browser add-ons for IE and Firefox, client installation scripts and an auto-updating platform. Heylos went through a controlled beta, primarily by word-of-mouth, and was in use by a few hundred users. Met with Tech Coast Angels to raise an angel round, however, I ultimately shut it down due to unavailability of a suitable entrepreneur VISA.
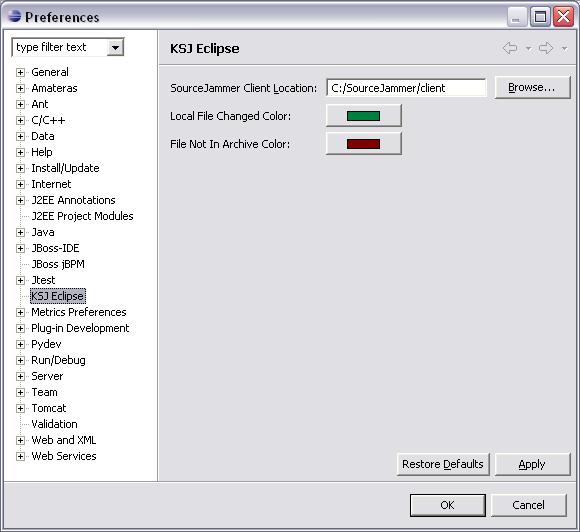
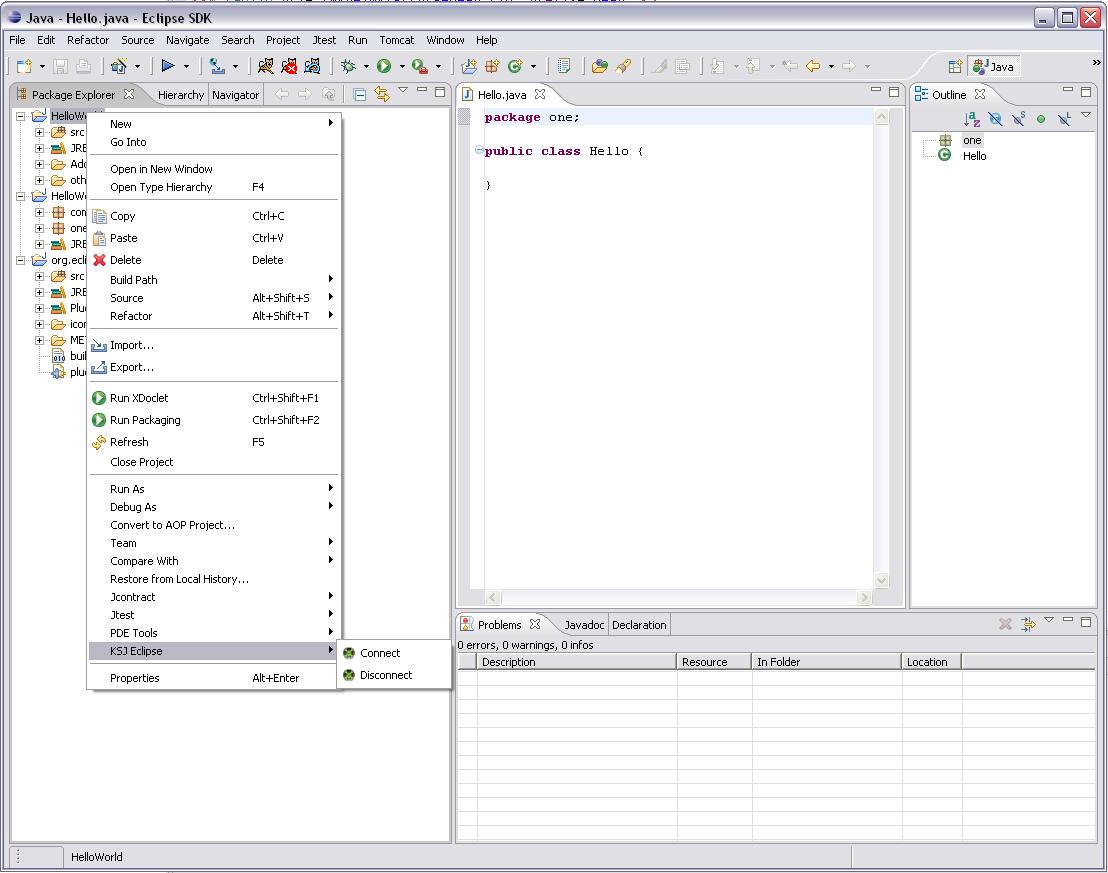
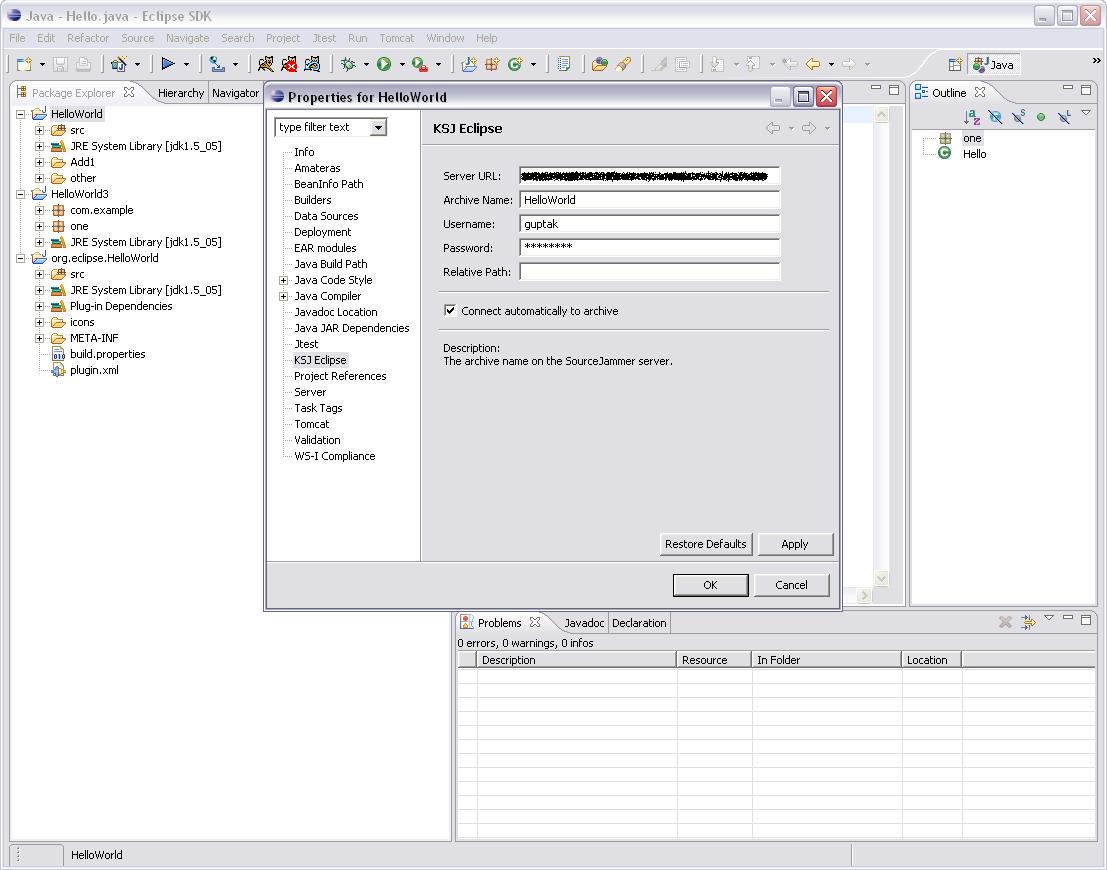
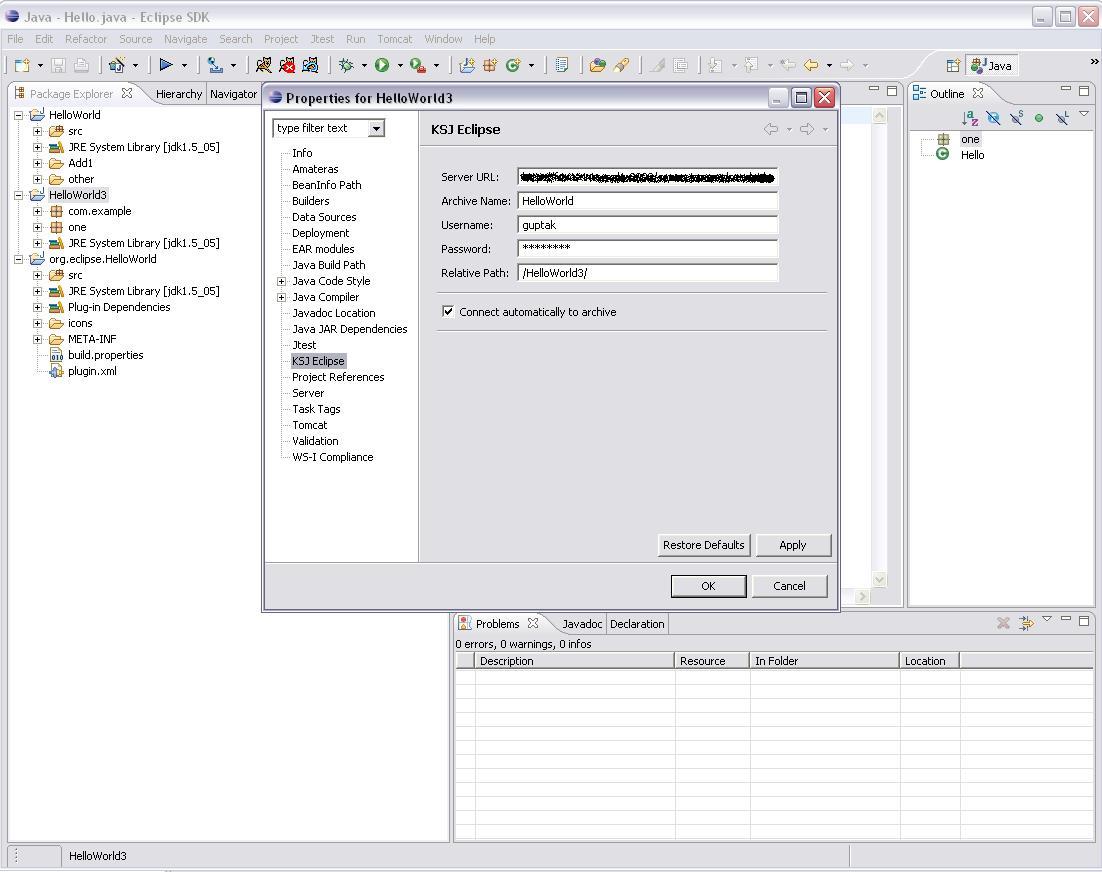
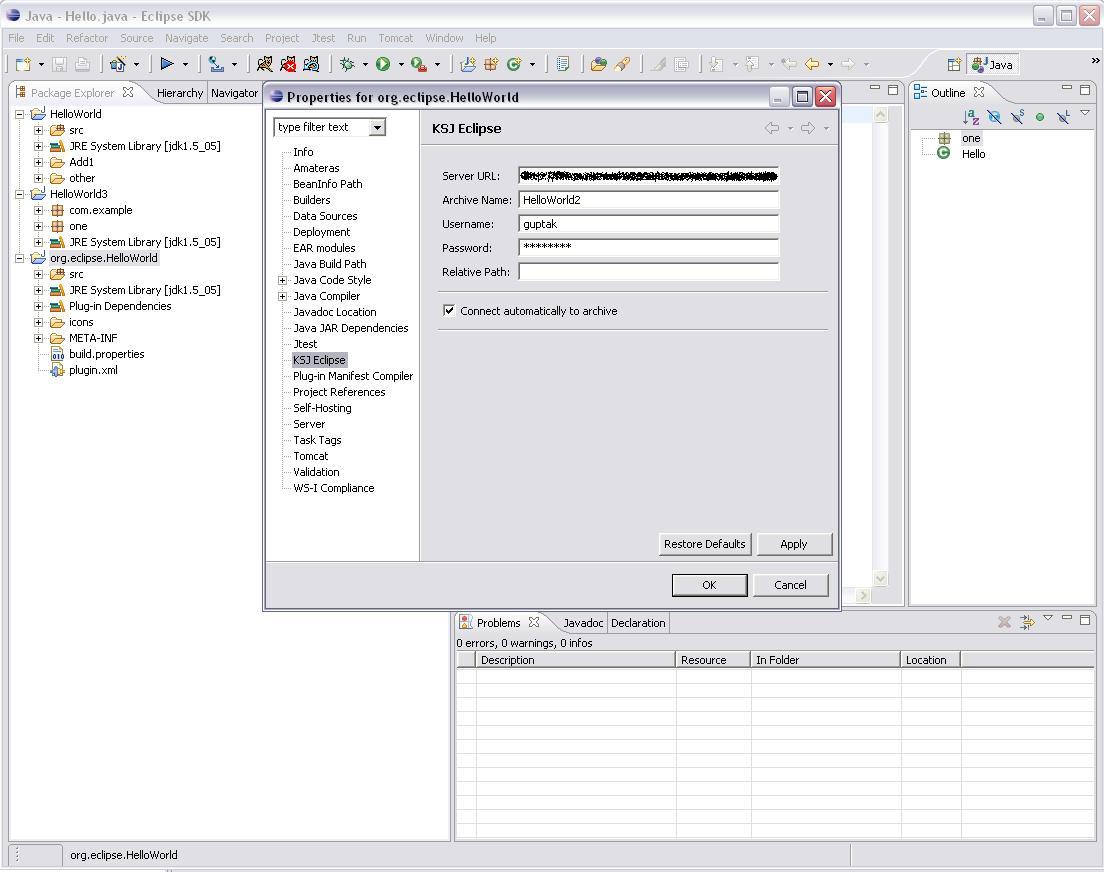
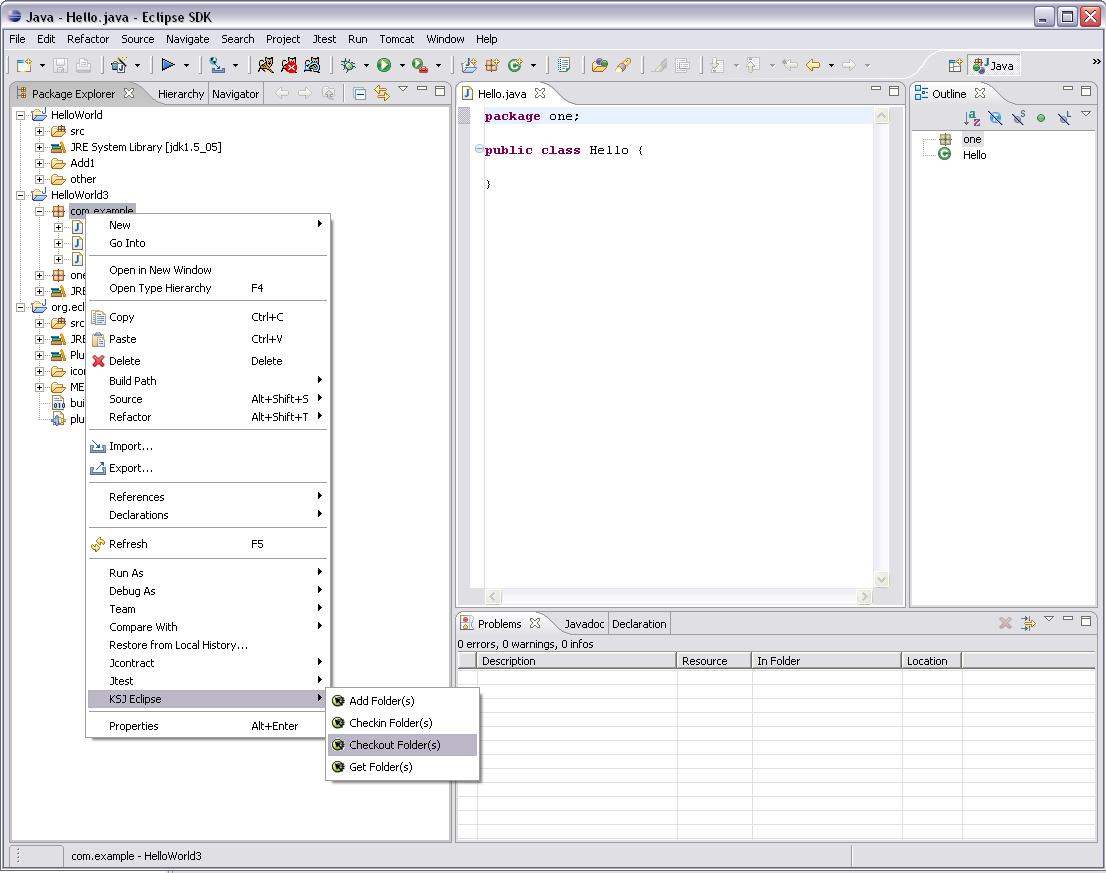
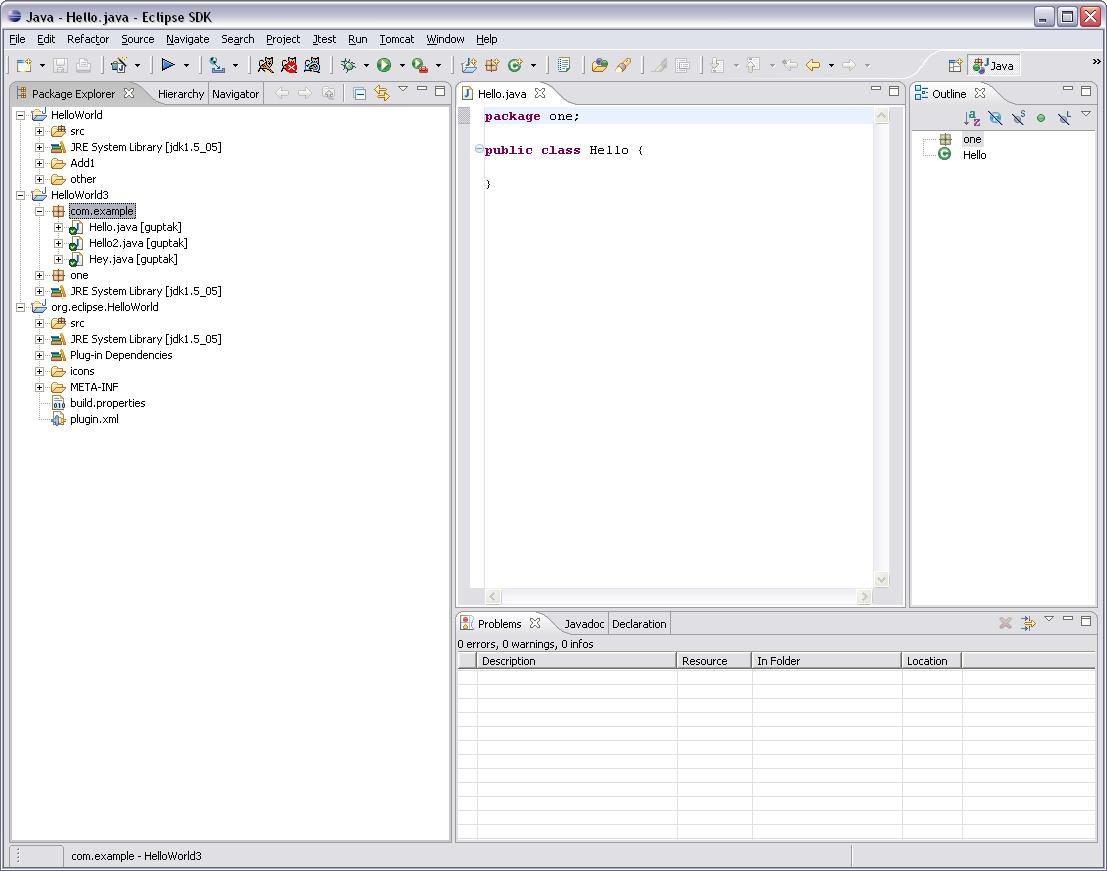
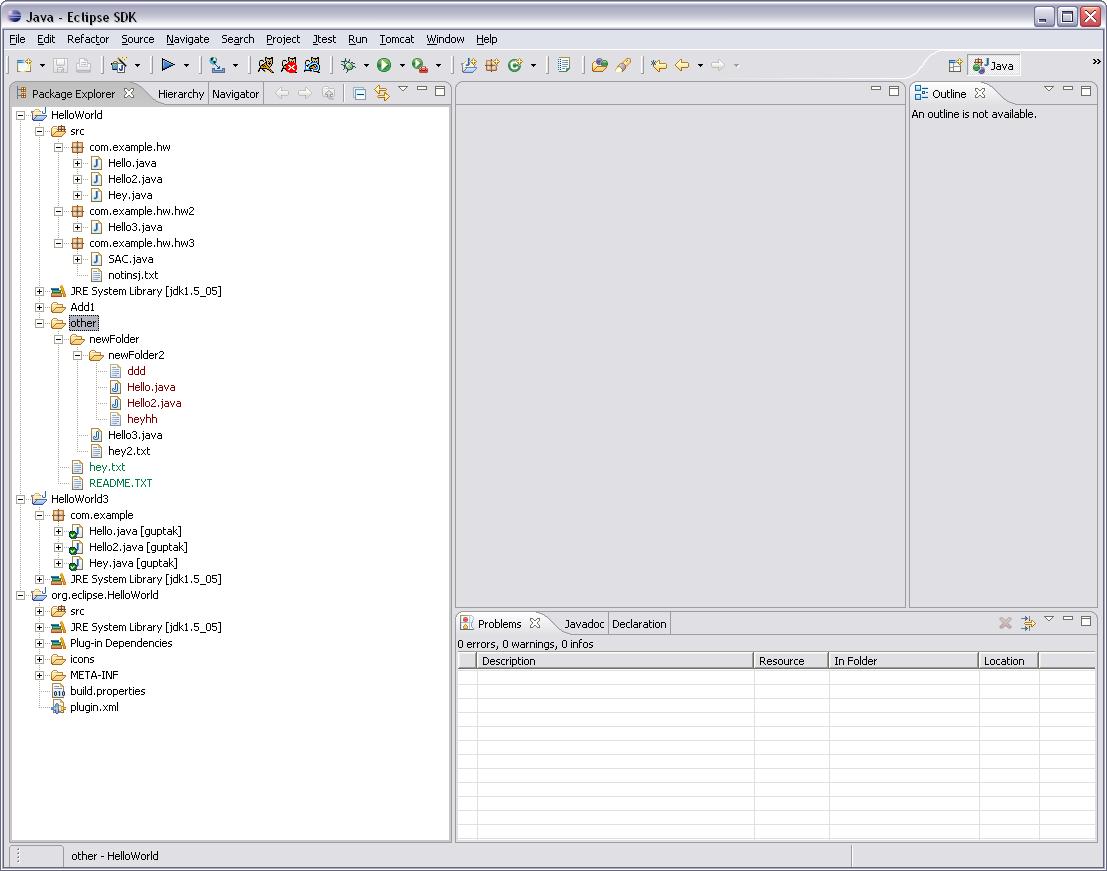
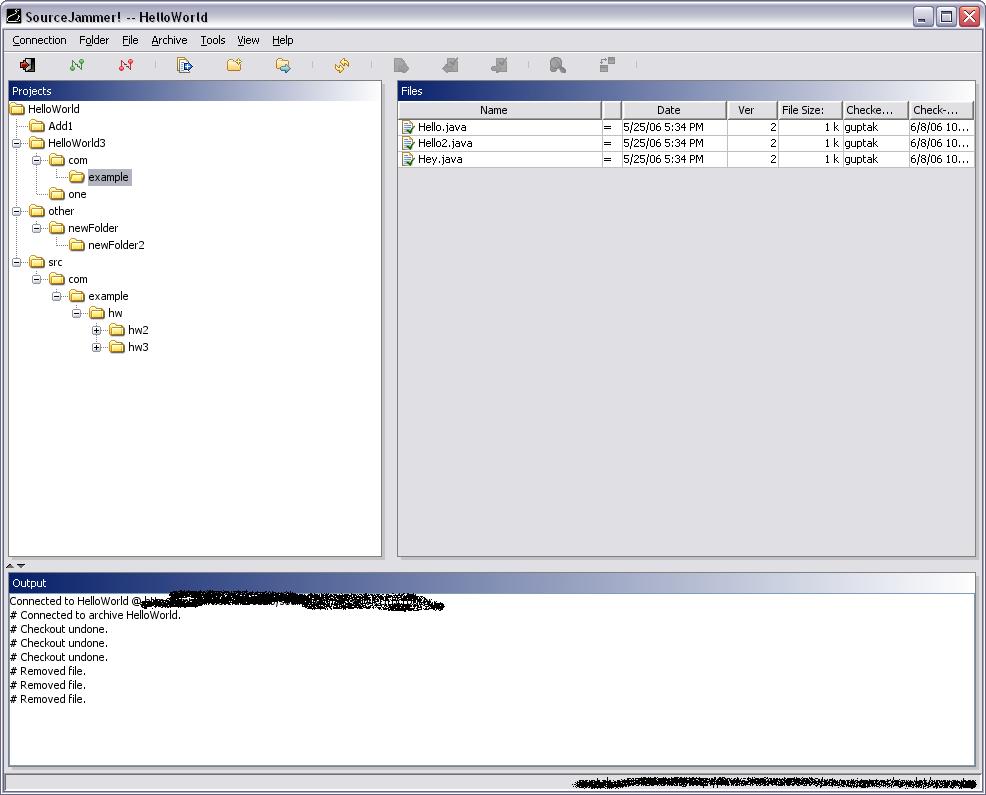
KSJEclipse
Developed a plugin for Eclipse to perform source control actions (e.g. checkin, checkout, etc) for the SourceJammer version control system. Now, developers can avoid switching between the IDE and the SourceJammer client to manage their code. More information can be found on the product homepage. Binaries, screenshots, documentation and source available at SourceForge.
TransCore
Developed Java web-applications that form an integral part of tolling solutions installed worldwide, such as FasTrak, EZ-Pass, Salik etc. Introduced open-source software alternatives, multiple DB support, server clustering, Java job-scheduling, and efficient scripts providing 100x improvement in build and deploy times. TransCore is the largest global manufacturer of transportation-based RFID technology and operates as a unit of the $6+ billion Roper Industries (NYSE: ROP).
Resolution Systems Inc.
Second employee in a high-tech, demanding startup environment, developing advanced TinyOS mesh sensor networks and Java scheduling applications for the restaurant and hospitality industry. Also developed an interrupt-driven standards-compliant I²C library for TI’s MSP430 processors without hardware support. A highly educational experience, where I worked extensively on various technologies as a Senior Engineer and Server Administrator.
Research, AI Robotics, Texas Tech University
I was in the AI Robotics Lab at TTU for most of my Masters, with guidance from Dr. Larry Pyeatt, and heavily influenced by Sebastian Thrun and Dr. Robin Murphy. Research Localization and Mapping solutions for robots and to apply concepts of Reinforcement Learning to Robotics. Carried out several projects during this time, exercising mechanical skills towards robot construction and algorithmic skills for intelligence.
Dead Reckoning & Time Based Navigation Robot
Designed a robot which would move on a specific path and return as close as possible to its starting position in the shortest amount of time. Used a Lego Mindstorms Kit to model and the NotQuiteC programming language. The dead-reckoning version involved counting the number of rotations of a wheel to measure how far the robot has moved, when its moving straight or turning. No matter how good a programmer you may be, you have no control over the dirt on the floor in a robot’s path, which will make it change course. Nor do you have control over the wear-and-tear of the robot’s joints, and rubber on the wheels: everything needs to be factored into the algorithm. The time-based version required measuring the amount of time taken for one unit rotation of the wheel, and using that measure to move the robot a certain distance. A lot of mechanical and electrical engineering also went into this project to reduce the effects of the environment as much as possible. After near perfect runs, with near perfect 90 degree turns, the robot was a mere 2 inches from its starting location.
Navigation Report (pdf) |
Dead Reckoning (nqc) |
Time Based (nqc) |
 |
 |
Line Follower Robot
Project to design the most accurate and fastest line-follower robot. The robot was made using the Lego Mindstorms Kit and the NotQuiteC programming language. The goal was to use light-sensors to detect and follow a line made using black-electrical tape on the floor. Since the line crisscrossed over itself, and the room was filled with fluorescent light, it was purposely difficult for the light-sensors to detect the lines. Completed the run in 56secs (under one minute, everytime). The first runner-up’s run took more than 4 minutes. Employing some smart engineering, after 3-4 prototypes, moved the RCX Brick onto a trailer, to reduce the weight (front-wheel drive). So the front moved/turned really fast, and the trailer with the heavy RCX brick simply followed it.





Mapping & Obstacle Avoidance Wandering Simulation
Designed a navigational and mapping obstacle-avoidance algorithm, experimenting on a simulator. I based my implementation on the HIMM algorithm proposed by Borenstein and Koren. The simulation was run on the Nomadic Technologies Super Scout II Simulator. Written entirely in C++ on a Linux machine, utilizing the Scout API extensively. This application was to achieve two goals: wander in the environment without hitting any obstacles that may be in the robot’s path, and to make a map of the environment as the robot sees it. The map was to be made using Occupancy grids.
Water Management System
Developed a Java Swing application, using JFreeChart and JFreeReport to interface with physical ORP, Pressure and pH sensors for data collection, report generation and control. Developed a PHP web interface to provide users ability to view data collected in the Oracle database.
